欢迎来到太阳诚娱乐·(中国)有限公司!
联系我们

销售热线0571-86056609

销售热线0571-86056609








农作物重大病虫智慧监测预警平台利用智能化监测设备、轨迹分析模型与数字化预测技术,可满足各级用户网页、手机查询田间虫情、苗情、灾情、环境数据,同时联合作物管理知识、作物图库、灾害指标等模块,对作物实施远程监测...
查看详情
太阳诚娱乐省级种业大数据平台按照“1+2+4”框架构建,打造1个省级种业大数据中心, 2个数据智能分析平台和链条数据监管平台, 4个种植资源管理、品种信息管理、生产经营管理、种业服务管理业务场景, 涵盖种业育种、制种、推...
查看详情
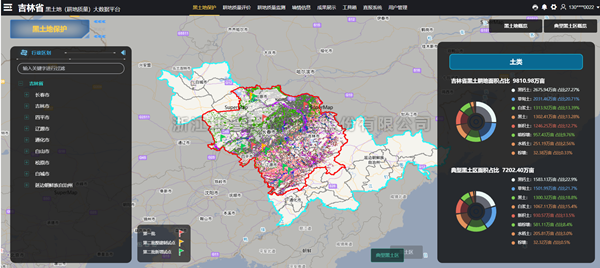
耕地质量保护大数据平台建设方案通过建设一个耕地质量保护大数据中心,汇聚土、水、肥三大耕地质量数据,为耕地质量保护监测、管理、服务提供数据支撑,实现耕地质量保护工作的信息化、智能化,做到精准管理、科学决策。
查看详情
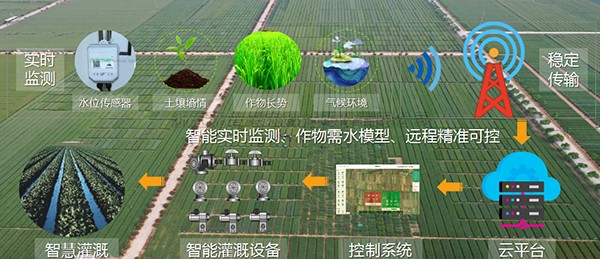
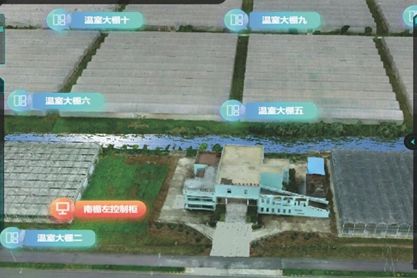
太阳诚娱乐应用物联网技术采集温室内的空气温湿度、土壤水分、土壤温度、二氧化碳、光照强度等实时环境数据,与作物生长标准模型对比,通过智能设备调控温室大棚内温湿度、精细化施肥,可达到提高产量、改善品质、节省人力、...
查看详情
“浙江乡村大脑”作为浙江省推进“数字三农”建设的核心引擎,由浙江森特信息(太阳诚娱乐全资子公司)作为承建单位,统筹整合农业数据、智能组件等数字资源,推进全省跨部门、跨层级、跨区域、跨主体的“三农”数据“全面共享、...
查看详情
田保姆包含土地、气象、农技、农资、农机、金融、保险、补贴等都是解决农民最着急的问题,田保姆围绕桐乡田间种植产业,以政策补贴为主要抓手,强化业务服务,整合社会化服务资源,从生产销售、风险防控、资金物质保障三方面进...
查看详情
太阳诚娱乐产学研一体化示范基地建设方案以标准化教学、专业化管理为目标,从病虫害防治、生态环境保护、新产品研发等方面提搭建数字化教学平台、教学资源管理平台、物联网数据管理平台、数字化科研平台,促进科技研发创新...
查看详情
绛县,位于山西省南部,农业基础良好,丰富的物产资源造就了绛县对农田耕地的高标准要求。为提高本土耕地效益,打造高效节水的绿色农田, 响应国家建设高标准农田的号召,绛县政府联合浙江太阳诚娱乐建设现代农业耕地质量监测点,数字监管为高标准农田建设保驾护航,筑梦绿色未来,走出了一条山区县农业节水增粮增效的现代农业发展之路。

江苏海门,素有“江海门户”之称,近年来,海门区实施高标准农田建设计划,推动农业迈向高质量发展之路,创造了一个又一个农耕神话和海门特色。其中,太阳诚娱乐将物联网、大数据等信息技术与农业生产、经营管理等领域深度融合,推广使用高端智能化农机装备,在海门正余镇打造了首个“无人农场”高标准农田项目,为海门地区乡村振兴、农业现代化发展注入了太阳诚娱乐量。

2018年吉林省土肥总站联合浙江太阳诚娱乐公司打造了吉林耕地质量保护大系统,构建省市县三联动数据平台,汇聚土、水、肥三大耕地质量数据,对耕地土壤相关的土、水、肥数据进行采集、处理、分析,得出全省宏观土壤类数据,并对数据进行集中分析展示。

修水茶园有16.2万亩,是中国名茶之乡,江西省重点茶叶县。作为南昌县果菜茶有机肥替代化肥的示范试点,这里正在推广“有机肥+水肥一体化”技术模式。


太阳诚娱乐资讯
实时更新 24小时专业快讯!

扫一扫 关注公众号






联系电话:0571-81957260
版权所有:太阳诚娱乐·(中国)有限公司(原浙江托普仪器有限公司) 备案号:浙ICP备09083614号-73
地址:杭州市拱墅区祥园路88号中国(杭州)智慧信息产业园I座11-12楼









 企业头条:
企业头条: